




Top 50 Popular Supplier
21/04/2557 10:00 น. ,
อ่าน 15,985 ครั้ง
ทำไมการสตาร์ทมอเตอร์โดยใช้Soft Starterถึงมีกระแสสูงกว่าใช้Resistance Step?
|
21/04/2557 10:00 น. |
ทำไมการสตาร์ทมอเตอร์โดยใช้Soft Starterถึงมีกระแสสูงกว่าใช้Resistance Step มอเตอร์ที่ใช้เป็นแบบSlip Ring 350Hp |
ความคิดเห็นที่ 1
|
21/04/2557 21:14 น. |
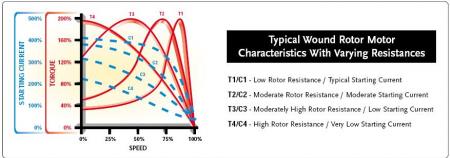
*** ส่วนรุ่นใหม่ๆ ไม่แน่ใจเพราะไม่ได้เล่นนานแล้ว ส่วนของสลิป-ริง starting current ที่ step แรก ณ.ที่ High rotor resistance) ก็อยู่ประมาณ 200 เปอร์เซ็นต์กว่าหรือสองเท่ากว่าๆ แต่จะสร้าง starting torqueสูง โดยหลักการแล้ว ทั้งสองวิธีใช้เทคนิคและวิธีที่ต่างกัน Soft Starter ใช้หลักการลดแรงดันที่จ่ายให้กับขดลวดสเตเตอร์ ซึ่งเปรียบเสมือนเป็นการสตาร์ทโดยการลดแรงดันแบบหนึ่ง ทอร์คจะแปรผันตามแรงดันยกกำลัง (ลดแรงดันลง 10 % จะส่งผลทำให้ทอร์คลดลง 19 % ) ส่วนการใช้ Resistance Step ไม่มีการลดแรงดันที่จ่ายให้กับมอเตอร์ แต่จะไปเพิ่มค่าความต้านให้กับโรเตอร์ขณะสตาร์ทและค่อยๆลดลงมาจนกระทั่งเป็นค่าความต้านทานภายนอกเป็น 0 ซึ่งก็จะส่งผลให้สมรรถนะหรือ characteristic ของการสตาร์ททั้งสองแตกต่างกัน ข้อดีของ Resistance Step คือเพิ่มค่าความต้านโรเตอร์ให้เหมาะสม มอเตอร์จะให้ starting torque ที่สูง ในขณะเดียวกัน starting current ก็จะต่ำ ส่วน Soft Starter จะแตกต่าง กระแสจะแปรผันตามกับ torque load ซึ่งถ้าระบบต้องการ starting torque ต่ำ เราก็สามารถลิมิตกระแสให้ต่ำลงได้ตามที่ต้องการ แต่ถ้าระบบที่ต้องการ starting torque สูงเราก็ต้องลิมิตกระแสให้สูงขึ้นตามไปด้วยตามสัดส่วนเพื่อมอเตอร์สร้างทอร์คได้มากว่าทอร์คโหลด ดังนั้นหากถามว่าทำไมกระแสของ Soft Starter ถึงมีกระแสสูงกว่าใช้Resistance Step คำตอบก็น่าจะตอบว่ามันขึ้นอยู่กับ torque load Soft Starter น่าจะตอบโจทย์ได้ดีกว่าหากโหลดเป็นกลุ่มที่ต้องการ starting torque ต่ำ เช่น Fan Blower Pump เป็นต้น *** หมายเหตุ อธิบายตามที่เข้าใจนะครับ ผิดถูกต้องขออภัย ใครมีความรู้ที่เหนือกว่าช่วยชี้แนะด้วยครับ |
ความคิดเห็นที่ 2
|
21/04/2557 21:17 น. |
http://9engineer.com/index.php?m=article&a=show&article_id=2174 |
ความคิดเห็นที่ 3
|
21/04/2557 21:18 น. |
|
ความคิดเห็นที่ 4

22/04/2557 09:31 น. |
ขอให้ความคิดเห็นอย่างนี้ครับ ถ้าเราช๊อตสลิปริง และจ่ายไฟเข้าโดยตรงที่สเตเตอร์ สิ่งที่เราได้จากมอเตอร์คือ กระแสสตาร์ทที่สูง และสตาร์ทติ้งทอร์คที่ต่ำ (กระแสสูงกว่า และทอร์คต่ำกว่า ตอนสตาร์ทแบบใชค่าความต้านทาน) ที่เป็นเช่นนี้เพราะมอเตอร์สลิป ริงถูกออกแบบมาให้มีค่าความต้านทานวงจรโรเตอร์ต่ำ ซึ่งในขณะสตาร์ทมอเตอร์สลิปริง ซึ่งเป็นมอเตอร์ประเภทเหนี่ยวนำ ความถี่เหนี่ยวนำที่ส่งถ่ายจากสเตเตอร์ไปยังโรเตอร์มีค่าสูงสุด หรือก็คือความถี่ของสเตเตอร์ ในจังหวะนี้ ค่า XL ของโรเตอร์ จะมีค่าหนีห่างจากค่าความต้านทานขดลวดมาก ทำให้แรงดันเหนี่ยวนำและกระแสที่ไหลในวงจรโรเตอร์ มีเฟสต่างกันเกิน มุม 45 องศาซึ่งเป็นมุมที่ทำให้เกิดค่าทอร์คสูงสุดที่มอเตอร์ ฉะนั้นในจังหวะนี้ ถ้าเราต้องการค่าทอร์คสูงสุดที่ได้จากมอเตอร์ เราต้องหาค่าความต้านทานภายนอกมาต่อเพิ่มเพื่อ ปรับค่าความต้านทานรวมของวจรโรเตอร์ เพื่อให้ แรงดันเหนี่ยวนำและกระแสที่ไหลในวงจรโรเตอร์ มีค่าใกล้เคียง มุม 45 องศา มากที่สุด ประกอบกับในสภาวะที่มีตัวต้านทานภายนอกมาต่อ จะส่งผลให้อิมพีแดนซ์ ( R+JXL) ของวงจรโรเตอร์มีค่าสูง ส่งผลต่อเนื่องให้กระแสโรเตอร์มีค่าต่ำ และส่งผลต่อไปยังขดลวดสเตเตอร์ให้มีค่าต่ำตามไปด้วย ( พฤติกรรม Transformer Effect ) ต่อมาเมื่อมอเตอร์เร่งตัวออกไป และเพิ่มความเร็วเพิ่มขึ้นเรื่อยๆ ความถี่เหนี่ยวนำจะลดลง ส่งผลให้ค่า XL ของวงจรโรเตอร์เปลี่ยนแปลงลดลง ก็จะส่งผลให้ค่ามุมต่างเฟสของกระแสและแรงดันที่โรเตอร์ ที่ออกแบบไว้ที่แรกเริ่มเปลี่ยนตามความเร็วรอบ จึงจำเป็นให้ต้องปรับเปลี่ยนค่าความต้านทานที่นำมาต่อ ในลักษณะเปลี่ยนให้ลดลง เนื่องจากค่า XL ลดลง จึงเป็นเหตุผลที่ทำให้เราต้องลดค่าความต้านทานภายนอก ลงมาเป็นสเต็ปๆ เรื่อยๆ จนถึงจุดที่ไม่ต้องใช้แล้ว และช๊อตในที่สุด และเรารู้กันอยู่แล้วว่า ซอร์ฟสตาร์ท เป็นอุปกรณ์ที่ใช้สตาร์ทมอเตอร์โดยการใช้วิธีการลดแรงดัน และเรารู้กันอีกว่า ทอร์คของมอเตอร์แปรผันตามค่าแรงดันที่ป้อน เมื่อความถี่คงที่ ฉะนั้นเมื่อนำ ซอร์ฟสตาร์ทไปจ่ายให้กับมอเตอร์สลิปริงที่ช๊อตขดลวดโรเตอร์ไว้ มอเตอร์จะผลิตทอร์คได้น้อยกว่าแบบเดิมเป็นอย่างมาก ด้วยเหตุสองปัจจจัย ( ไม่มีตัวต้านทาน และลดแรงดัน ) ส่งผลให้ต้องปรับค่าโวลท์หรือกระแสที่ใช้สตาร์ทที่มีค่าสูง และแน่นอนว่าทอร์คที่ต่ำและอิมพีแดนซ์ของของวงจรโรเตอร์ที่ต่ำย่อมส่งผลให้กระแสโรเตอร์ที่มีค่าสูง และกระแสสเตเตอร์มีค่าสูงในที่สุด สรุปก็จะสอดคล้องกับพี่เสือที่ว่า การใช้งานซอร์ฟสตาร์ทไปสตาร์ทมอเตอร์สลิป ริงที่ช๊อตขดลวดโรเตอร์ ไม่เหมาะกับมอเตอร์ที่ต้องไปขับโหลดที่ต้องการสตาร์ทติ้งทอร์คสูงๆ |
ความคิดเห็นที่ 5
|
25/07/2557 08:10 น. |
การควบคุมแบบ Resistance Step คือการควบคุมอัตราส่วนความต้านทานโรเตอร์กับความเร็วรอบ (R2/slip) เนื่องจากค่าแรงบิดสูงสุด (Pull out Torque) จะแปรผันตามค่า R2/slip ส่วนเรื่องที่ท่านช่างฯ อธิบายเรื่องค่า XL และ มุม 45 องศา ผมได้ลองเช็คกับ Text Book ดูแล้วปรากฏว่ามีจุดที่ไม่ถูกต้องอยู่ครับ เดี๋ยวจะเขียนอธิบายตามที่ผมเข้าใจจาก Text Book ให้อ่านกัน |
ความคิดเห็นที่ 6
|
25/07/2557 08:18 น. |
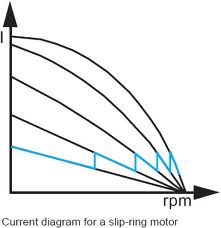
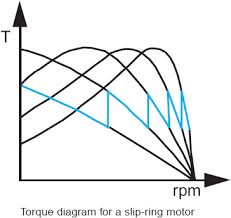
ตามรูปที่ 2 ของพี่เสือ ที่แต่ละ R2 จะให้ค่า Torque-Speed Characteristic ที่แตกต่างกัน แต่ค่าแรงบิดสูงสุด (Pull out Torque) มีค่าคงที่เนื่องจากการควบคุม R2/slip |
ความคิดเห็นที่ 7
|
25/07/2557 20:34 น. |
ขออธิบายเรื่อง Torque-Speed Characteristic หน่อยนะครับ แรงบิดของมอเตอร์ = K x Br x Bnet x cosQ Br คือ สนามแม่เหล็กบนโรเตอร์ แปรผันตรงกับกระแสในโรเตอร์ Bnet คือสนามแม่เหล็กรวมระหว่างสเตเตอร์กับโรเตอร์ Q (ใช้แทนสัญลักษณ์ Theta) คือมุมเฟสระหว่างแรงดันกับกระแสบนโรเตอร์ cosQ จะมีค่ามากที่สุดที่มุมระหว่างแรงดันกับกระแสโรเตอร์ = 0 ( in phase) ตอนออกตัว ความเร็วรอบเป็น 0 slip (s) มีค่ามากที่สุด (=1)ความถี่บนโรเตอร์จะมีค่ามากที่สุดเท่ากับความถี่ของระบบไฟฟ้า (fr = s x ความถี่ระบบไฟฟ้า) XL ขอโรเตอร์ จะมีค่ามาก (XL = 2 x pi x fr) ค่าแรงดันบนโรเตอร์จะมีค่ามากที่สุด ทำให้กระแสในโรเตอร์มีค่ามาก ส่งผลให้ Br มีค่ามาก cosQ มีค่าน้อยเนื่องจากกระแสจะล้าหลังแรงดันเยอะจากผลของ XL เมื่อความเร็วเพิ่มขึ้น slip จะมีค่าลดลง ความถี่นบโรเตอร์จะมีค่าลดลว XL จะมีค่าลดลง ทำให้กระแสล้าหลังแรงดันลดลง ทำให้ cosQ มีค่าเพิ่มขึ้น ในขณะเดียวกันแรงดันบนโรเตอร์จะมีขนาดลดลงเนื่องจากความเร็วสัมพัทธ์ของสนามแม่เหล็กที่วิ่งตัดโรเตอร์มีค่าลดลงทำให้กระแสในโรเตอร์ลดลง และ Br มีค่าลดลง ที่จุดนี้ แรงบิดจะมีค่าเพิ่มขึ้นเนื่องจากผลของการเพิ่มขึ้นของ cosQ มีมากกว่าการลดลงของ Br เมื่อความเร็วเพิ่มจนถึงจุดนึงเนื่องจาก XL มีค่าลดลงมาก ค่า cosQ จะเพิ่มขึ้นช้า ขณะที่แรงดันบนโรเตอร์และกระแสยังคงลดลงอย่างต่อเนื่อง (Br ยังคงลดลง) เมื่อผ่านจุดนี้ไปค่าแรงบิดจะมีค่าลดลง เนื่องจากผลของ Br จะมีมากกว่าผลของ cosQ ที่จุดนี้จะเป็นจุดที่แรงบิดมากที่สุด (Pull out Torque) และไม่จำเป็นที่จุดนี้จะเกิดที่มุมล้าหลัง 45 องศานะครับ จากวงจรสมมูล จุดที่เกิด Pull out Torque จริงๆคือที่ slip = R2 / sqrt (RTH^2 + (XTH + X2)^2) โดย R2 คือ ความต้านทานโรเตอร์ X2 คือ ความเหนี่ยวนำของโรเตอร์ XTH ~ X1 คือ ความเหนี่ยวนำของสเตเตอร์ RTH ~ R1(Xm/X1+Xm)^2 R1 ความต้านทานสเตเตอร์ และ Xm คือ ค่าความเหนี่ยวนำสร้างสนามแม่เหล็ก ดังนั้นถ้าเราสามารถปรับเปลี่ยนค่า R2 (โดยการเอาความต้านทานภายนอกมาต่อกะขดลวด) เราสามารถเปลี่ยนจุดที่ทำให้เกิด Pull out Torque ได้ |
ความคิดเห็นที่ 8
|
09/08/2557 11:27 น. |
กระทู้นี้วิชาการมากเกินความสามารถผมครับ แหะๆ คห.4 กะ คห.7 อันไหนถูกกันแน่ครับ อ่านแล้วงงทั้งคู่ |
ความคิดเห็นที่ 9
|
14/08/2557 18:41 น. |
ผมเชื่อพี่ช่างซ่อมมอเตอร์ครับ ผมว่าเรื่องมอเตอร์แกรู้ลึกรู้จิง |
ความคิดเห็นที่ 10
|
17/08/2557 23:54 น. |
ทำไมมุม 45 องศาถึงให้ค่าทอร์คสูงสุดครับพี่ๆ |
ความคิดเห็นที่ 11
|
21/08/2557 20:58 น. |
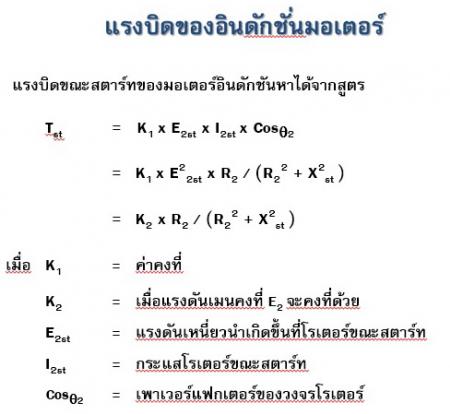
ขอบคุณครับ สำหรับการคอมเมนท์ และดีใจมากเลย ที่มีคนอ่านเนื้อหาของผมที่เขียนไปแล้วนำไปวิเคราะห์ ซึ่งหายากมาก ก็เห็นจะมีท่าน Elec Prew คนเดียวจริงๆ ต้องขอขอบคุณจริงๆ ก่อนอื่นขอเล่าที่มาที่ไป สักนิดนึงก่อน เรื่องมอเตอร์สลิป ริงว่าพอดีได้โจทย์ให้ไปบรรยายเรื่องการบำรุงรักษามอเตอร์สลิป-ริง ซึ่งแน่นอนว่าต้องมีการพูดถึง ทฤษฏี แต่ผมเองก็ไม่อยากยกมามาก ก็เลยรวบรัดตัดเอาเฉพาะสูตร ที่เกี่ยวกับช่วงระยะเวลาการสตาร์ท มาพูดเท่านั้น ซึ่งก็ได้สูตรตามนี้ |
ความคิดเห็นที่ 12
|
21/08/2557 20:59 น. |
|
ความคิดเห็นที่ 13
|
21/08/2557 21:04 น. |
ซึ่งในการบรรยาย เหตุผลที่ยกสูตรนี้มา ต้องการเพื่อที่จะอธิบายถึงว่า ทอร์ค มีค่า R2 เป็นปัจจัยหลัก ที่มีผลต่อทอร์ค และเมื่อพิจารณา ตรงสูตรบรรทัดแรก ก็เข้าใจเหมือน ท่าน Elec-Prew เลยว่า กระแส และแรงดัน ต้องมีเฟส เดียวกัน คือ Cos Fi = 1 จึงจะทำให้ได้ค่าทอร์คสูงสุด ตามสไลด์ที่ผมได้ทำไว้ตอนที่ไปบรรยาย |
ความคิดเห็นที่ 14
|
21/08/2557 21:05 น. |
|
ความคิดเห็นที่ 15
|
21/08/2557 21:15 น. |
โดยปกติ ในการบรรยาย ซึ่งลูกค้าส่วนมากไม่ใช่กลุ่มลูกค้าทางระยอง ยังไม่เคยมีให้ผม Derive สูตรให้ดู พอดีวันนั้นลูกค้าเป็นลูกค้ากลุ่มระยอง ต้องการให้ผม Derive ซึ่งผมเองไม่ได้เตรียมตัวไป เพราะจุดประสงค์ไม่ต้องการไปสอนวิชาเครื่องกล แต่อยากให้เอาสุตร นำไปใช้เลย เลยขอที่จะส่งข้อมูลไปให้ทีหลัง และเมื่อมาหาข้อมูลเพิ่มเติม ได้อ่าน Tech และได้ข้อมูลเพิ่มเติมว่า มุมที่จะทำให้แรงบิดขณะสตาร์ท มีค่าสูงสุดได้ กระแส และแรงดัน ต้องมีมุมห่างกัน 45 องศา ตอนแรกก็ไม่เชื่อ แต่ลองมาพิจารณา สูตรที่เขาตัดค่าคงที่ ออกไปแล้ว จะเป็นว่ามีแต่ค่า R2 และ X2 ก็เลยลองแทนค่าใน Exel ดูตามตามราง |
31 August 2025
:: MEMBER LOGIN
:: OUR SPONSORS










|
|

Copyright© 9engineer.com, All rights reserved. Tel. 086-1222078 Email: no-reply@9engineer.com (Powered By : SiamWebMaker.in.th)