




Top 50 Popular Supplier
02/09/2563 08:23 น. ,
อ่าน 61,276 ครั้ง
วงจรกลับทางหมุนมอเตอร์
โดย : Admin
Reversing of Three Phase Motors
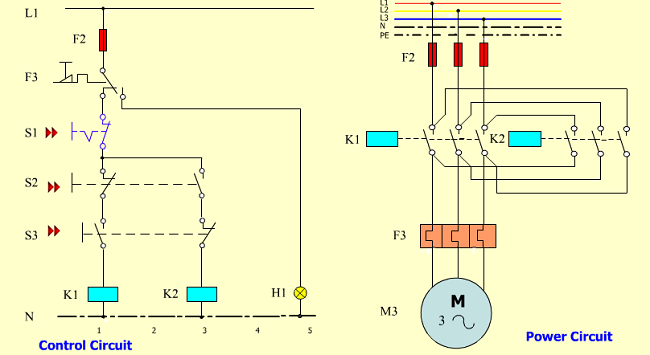
วงจรควบคุมการกลับทางหมุนมอเตอร์สามเฟส
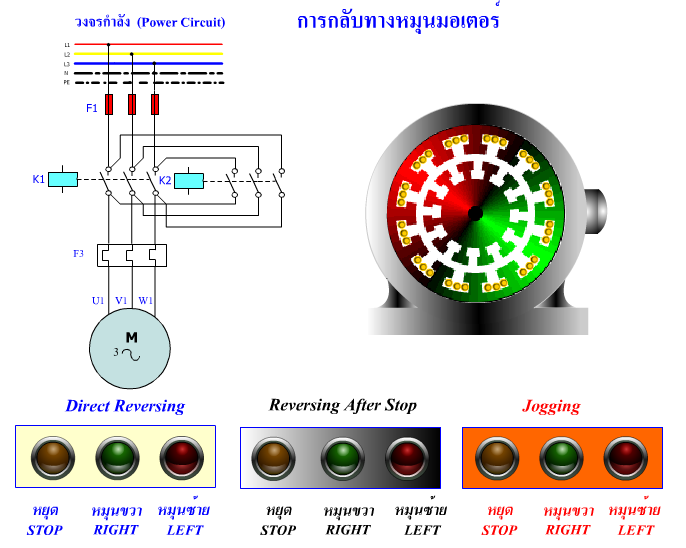
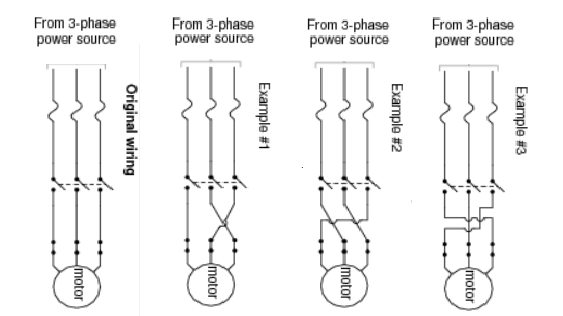
การกลับทางหมุนมอเตอร์สามเฟสโดยทั่วไปสามารถทำได้โดยการกลับขั้วสายของมอเตอร์ที่ต่อเข้ากับสายจ่ายกำลัง 3 เฟส คู่ใดคู่หนึ่งเพียงคู่เดียว ดังรูป
ในวันเก่าๆในสมัยก่อน การจะควบคุมมอเตอร์ให้หมุนกลับทางส่วนใหญ่ก็จะใช้สวิตซ์เป็นตัวควบคุมซึ่งเรียกว่าดรัมสวิตว์ แต่ในปัจจุบันหลังจากที่เทคโนโลยีมีการพัฒนามากขึ้น อุตสาหกรรมก็หันมาใช้คอนแทคเตอร์เป็นตัวควบคุมการกลับทางหมุนมอเตอร์แทน ซึ่งวิธีการกลับทางหมุนมอเตอร์สามเฟสด้วยคอนแทกเตอร์ที่นิยมกันโดยทั่วไปนั้นก็มีอยู่ด้วยกัน 3 แบบด้วยกัน วงจรกลับทางหมุนมอเตอร์โดยตรง (Direct reversing) ,วงจรกลับทางหมุนหลังจากหยุดมอเตอร์ (Reversing after stop) และ วงจรกลับทางหมุนแบบจ๊อกกิ้ง (Reversing by Jogging )
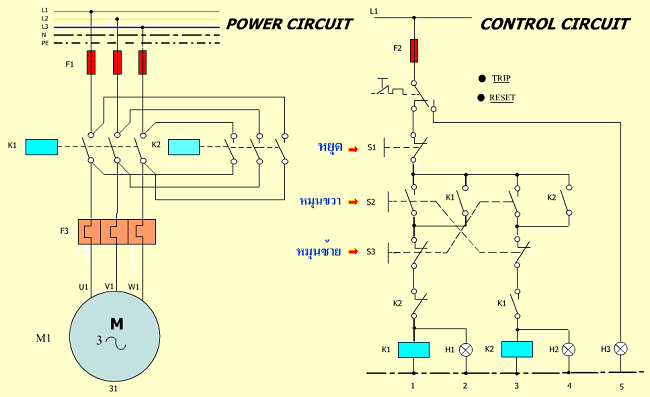
1. วงจรกลับทางหมุนมอเตอร์โดยตรง (Direct reversing)
วิธีการกลับทางหมุนมอเตอร์สามเฟสทำได้โดยการสลับสายเมนคู่ใดคู่หนึ่งที่ต่อเข้ากับมอเตอร์ ส่วนอีกเส้นหนึ่งต่อไว้เหมือนเดิม
ลักษณะการกลับทางหมุนแบบกลับทางหมุนโดยตรง หมายถึง วงจรสามารถทำการกลับทางหมุนมอเตอร์ได้ทันทีตลอดเวลาที่มอเตอร์ทำการหมุนอยู่ โดยการกดสวิตช์ S2 หรือ S3 และเมื่อต้องการหยุดมอเตอร์ก็สามารถทำได้โดยการกดสวิตช์ S1 (OFF)
ลักษณะการทำงานของวงจร
1) คอนแทกเตอร์ K1 ทำหน้าที่ต่อให้มอเตอร์หมุนขวา และคอนแทกเตอร์ K2 ทำหน้าที่ต่อให้มอเตอร์หมุนซ้าย
2) เริ่มเดินมอเตอร์ให้หมุนซ้ายหรือขวาก่อนก็ได้โดยการกดสวิตช์ S2 หรือ S3 และสามารถทำการกลับทางหมุนได้ตลอดเวลาโดยไม่จำเป็นต้องทำให้มอเตอร์หยุดหมุนก่อน
3) เมื่อต้องการหยุดมอเตอร์ให้ทำการกดปุ่มสวิตช์ S1
4) ถ้ากดสวิตช์ปุ่มกด S2 และ S3 พร้อมกันจะไม่มีคอนแทกเตอร์ตัวใดทำงาน และคอนแทกเตอร์ K1 และ K2 ไม่สามารถทำงานพร้อมกันได้ เนื่องจากมี interlock contact K1 และ K2 ต่อไว้ก่อนเข้าคอล์ยแม่เหล็กของ K1 และ K2 เพื่อเป็นการป้องกันการลัดวงจร
5) เมื่อเกิดการโอเวอร์โหลดขึ้น โอเวอร์โหลดรีเลย์ F3 แบบมีรีเซ็ทด้วยมือ จะทำหน้าที่ตัดวงจรควบคุมออกไป
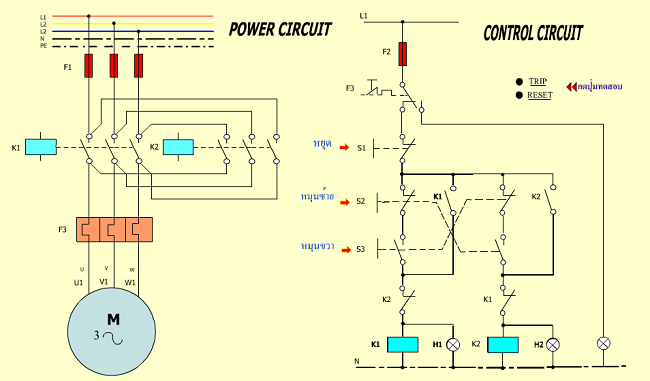
2. วงจรกลับทางหมุนหลังจากหยุดมอเตอร์ (Reversing after stop)
ลักษณะการกลับทางหมุนหลังจากหยุดมอเตอร์ หมายถึง วงจรจะกลับทางหมุนมอเตอร์ได้ เมื่อทำการหยุดมอเตอร์ก่อนเท่านั้น การเริ่มเดินมอเตอร์จะเริ่มเดินให้หมุนขวาหรือซ้ายก่อนก็ได้ โดยการกดสวิตช์ S2 หรือ S3 และเมื่อต้องการหยุดมอเตอร์ก็สามารถทำได้โดยการกดสวิตช์ S1 (OFF)
ลักษณะการทำงานของวงจร
1) คอนแทกเตอร์ K1 ทำหน้าที่ต่อให้มอเตอร์หมุนขวา และคอนแทกเตอร์ K2 ทำหน้าที่ต่อให้มอเตอร์หมุนซ้าย
2) เริ่มเดินมอเตอร์ให้หมุนซ้ายหรือขวาก่อนก็ได้โดยการกดสวิตช์ S2 หรือ S3 ในขณะที่มอเตอร์กำลังหมุนอยู่ไม่สามารถทำการกลับทางหมุนได้ จะต้องทำให้มอเตอร์หยุดหมุนเสียก่อนโดยการกดสวิตช์ S1
3) ถ้ากดสวิตช์ปุ่มกด S2 และ S3 พร้อมกันจะไม่มีคอนแทกเตอร์ตัวใดทำงาน และคอนแทกเตอร์ K1 และ K2 ไม่สามารถทำงานพร้อมกันได้ เนื่องจากมี interlock contact K1 และ K2 ต่อไว้ก่อนเข้าคอล์ยแม่เหล็กของ K1 และ K2 เพื่อเป็นการป้องกันการลัดวงจร
4) เมื่อเกิดการโอเวอร์โหลดขึ้น โอเวอร์โหลดรีเลย์ F3 แบบมีรีเซ็ทด้วยมือ จะทำหน้าที่ตัดวงจรควบคุมออกไป
3. วงจรกลับทางหมุนแบบจ๊อกกิ้ง (Reversing by Jogging )
การกลับทางหมุนแบบจ๊อกกิ้ง หมายถึงการกลับทางหมุนมอเตอร์โดยการกดสวิตช์ปุ่มกดค้างไว้ เมื่อปล่อยมือออกจากสวิตช์ปุ่มกดมอเตอร์ก็จะหยุดหมุน
การเริ่มสตาร์ทมอเตอร์จะต้องทำการกดสวิตซ์ S1 ก่อนเป็นอันดับแรก กระแสจึงจะผ่าน S1 มาได้ จากนั้นจึงจะสามาระควบคุมให้มอเตอร์เริ่มทำงานได้
การเริ่มเดินเครื่องหรือจะการควบคุมให้มอเตอร์เริ่มหมุนออกตัว เราจะเริ่มเดินให้หมุนขวาหรือซ้ายก่อนก็ได้ โดยการกดสวิตช์ S2 หรือ S3 ซึ่งเป็นสวิตว์แบบกดติด-ปล่อยดับ ดังนั้นมอเตอร์จะทำงานเฉพาะตอนกดปุ่มสวิตซ์ค้างไว้เท่านั้น หากปล่อยสวิตซ์มอเตอร์จะหยุดทันที
และเมื่อไม่ต้องการให้วงจรทำงานก็ทำการปลดสวิตช์ S1 ออกซึ่ง S1 เป็นสวิตช์แบบมีล็อคในตัวเอง หรือสวิตซ์แบบกดติดกดดับ
การทำงานของวงจร
1) คอนแทกเตอร์ K1 ทำหน้าที่ต่อให้มอเตอร์หมุนขวา และคอนแทกเตอร์ K2 ทำหน้าที่ต่อ
ให้มอเตอร์หมุนซ้าย
2) ก่อนที่จะเริมเดินมอเตอร์ จะต้องกดสวิตซ์ S1 ซึ่งเป็นสวิตซ์แบบซีแล็คเตอร์สวิตซ์ ให้อยู่ในตำแหน่งเปิด (ON) ก่อน
3) จากนั้นจึงเริ่มเดินมอเตอร์ให้หมุนซ้ายหรือขวาก่อนก็ได้โดยการกดสวิตช์ S2 หรือ S3 และจะต้องกดสวิตช์ตลอดเวลาที่ต้องการให้มอเตอร์หมุนถ้าปล่อยมือออกจากสวิตช์ปุ่มกดมอเตอร์จะหยุดหมุน
4) ถ้ากดสวิตช์ปุ่มกด S2 และ S3 พร้อมกันจะไม่มีคอนแทกเตอร์ตัวใดทำงาน และคอน
แทกเตอร์ K1 และ K2 ไม่สามารถทำงานพร้อมกันได้
5) เมื่อเกิดการโอเวอร์โหลดขึ้น โอเวอร์โหลดรีเลย์ F3 แบบมีรีเซ็ทด้วยมือ จะทำ
หน้าที่ตัดวงจรควบคุมออกไป
6) เมื่อไม่ต้องการเดินมอเตอร์ให้ กดสวิตซ์ S1 กลับมาอยู่ที่ตำแหน่งปิด (OFF) เสมอ

ตัวอย่างอุปกรณ์ที่นิยมใช้วงจรกลับทางหมุนแบบ Jogging ซึ่งส่วนใหญ่จะเป็น รอกและเครน Hoist Crane
น
========================================================
 |
||
- ================= ยูทุปของ 9engineer ,com ===================
- คลิปที่น่าสนใจจัดทำโดย 9engineer.com ภายใต้ชื่อช่องTechnology talk Channel
- 1. วงจรและวิธีการสตาร์ทแบบไดเร็คออนไลน์ DOL
- 2. วงจรควรคุมการกลับทางหมุน
- 3. วงจรและวิธีการสตาร์ทแบบสตาร์ เดลต้า Y-D Starter
- 4. การสตาร์แบบออโตทรานส์ฟอร์เมอร์ Auto transformer starter
- 5. การต่อขดลวดมอเตอร์ อย่างไรไม่ให้เกิดการใหม้หรือเสียหาย
- 6. การเช็ตโอเวอร์โหลดรีเลย์
- 7.การเช็ตโอเวอร์โหลดรีเลย์กับมอเตอร์ที่มีเซอร์วิสแฟคเตอร์
- 8.รีเลย์กับคนแทคเตอร์ต่างกันอย่างไร
- 9.อื่นๆ
- **** นายเอ็นจิเนียร์ขอสงวนสิทธิ์รับรองความถูกต้อง โปรดใช้วิจารณญาณในการรับข่าวสารข้อมูล