




โดย : สุชิน เสือช้อย
webmaster(at)9engineer.com

อุปกรณ์ป้อนกลับ (Feedback Device) หรือที่นิยมเรียกขานกันในแวดวงอุตสาหกรรมว่า"เอนโค๊ดเดอร์ (encoder)" ถือได้ว่าเป็นองค์ประกอบที่สำคัญอีกส่วนหนึ่งในระบบขับเคลื่อนเซอร์โวมอเตอร์ และระบบขับเคลื่อนไฟฟ้าแบบเอซีชนิดที่ควบคุมแบบโคลสลูป (ระบบเซอร์โวไม่สามารถควบคุมได้ หากระบบปราศจากเอนโค๊ดเดอร์)
เอนโค๊ดเดอร์ทำหน้าที่อะไร และมีกี่ชนิด อะไรบ้าง ?
เอนโค๊ดเดอร์จะทำหน้าที่เสมือนกับผู้ตรวจการ โดยจะทำหน้าที่ตรวจวัดความเร็ว(speed) , ทิศทางการหมุนของมอเตอร์(Direction of Rotation ) และตำแหน่งเพลาของโรเตอร์ ( shaft position) แล้วรายงานผลกลับไปยังคอนโทรลเลอร์ เพื่อควบคุมให้ทรานซิสเตอร์กำลังในวงจรกำลังของชุดขับเคลื่อนเซอร์โวเกิดการตัด-ต่อกระแสไฟฟ้าให้สัมพันธ์กับตำแหน่งของโรเตอร์
จากบทบาทของเอนโค๊ดเดอร์ซึ่งทำหน้าที่ตรวจวัดความเร็ว(speed) และตำแหน่ง(position) ของมอเตอร์ จึงทำให้อุปกรณ์ชนิดนี้ถูกเรียกชื่อตามบทบาทและหน้าที่ว่า speed sensor หรือไม่ก็เรียกว่า shaft Position Sensor ( ซึ่งมักนิยมเรียกในระบบเซอร์โว) โดยประกอบด้วยชนิดต่างๆ ดังนี้
รุปแสดงการแยกประเภทของเอนโค๊ดเดอร์ (ภาษาเยอรมัน)
จากรูป เอนโค๊ดเดอร์ (Geber=Encoder) สามารถแยกประเภทตามหลักการได้ 2 กลุ่ม คือชนิดที่ทำงานโดยอาศัยหลักการเหนี่ยวนำหรือเรียกว่าอะนาลอก เอนโค๊ดเดอร์ (Analog Geber=Analog Encoder) และชนิดที่ทำงานโดยอาศัยหลักการดิจิตอล(digital Geber=digital Encoder)
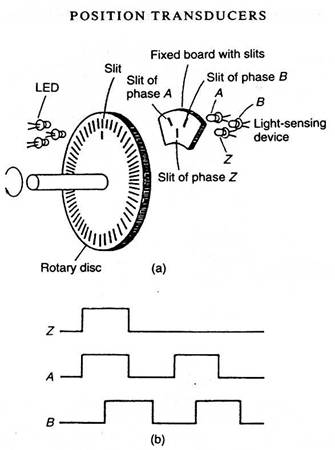
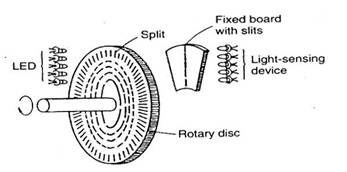
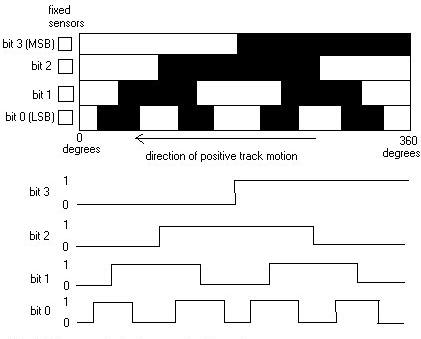
ชนิดที่ทำงานโดยอาศัยหลักการเหนี่ยวนำหรือเรียกว่าอะนาลอกจะประกอบด้วยเทคโคเจนเนอเรเตอร์(TachoMaschinen = TachoGenerator) และ รีโซลเวอร์ (Resolver) ส่วนชนิดที่ทำงานโดยอาศัยหลักการออพติคอล หรือแบบดิจิตอลจะแยกเป็นแบบ incremental encoder และ absolute encoder ซึ่งแต่ละชนิดมีหลักการทำงานดังนี้
เทคโคเจนเนอเรเตอร์ (TachoGenerator)
นิยามของเทคโคเจน ก็คือเจนเนอเรเตอร์ขนาดเล็ก ที่ทำหน้าที่แปลงความเร็วรอบมาเป็นแรงดันไฟฟ้าสำหรับควบคุม 0-10 V. เพื่อป้อนกลับไปยังชุดไดร์ฟ (โดยทั่วไปจะใช้ในระบบดีซีไดร์ฟ)
รีโซลเวอร์ (Resolver)
รีโซลเวอร์เป็นเซนเซอร์ชนิดที่มีการใช้งานมากในระบบเซอร์โว เนื่องจากมีความแข็งแรงทนทาน ทนต่อสภาพแวดล้อมอุตสาหกรรมได้ดี เช่นแรงสั่นสะเทือน ,แรงกระแทก และอุณหภูมิรอบข้าง เป็นต้น
รีโซลเวอร์มีลักษณะคล้ายกับหม้อแปลงตัวเล็ก ๆ (small Transformer) หรือในหนังสือบางเล่มใช้คำอธิบายในเชิงเปรียบเทียบว่า "Rotary Transformer" ซึ่งต้องการสื่อถึงหม้อแปลงไฟฟ้าแบบหมุนนั่นเอง
|
|
|

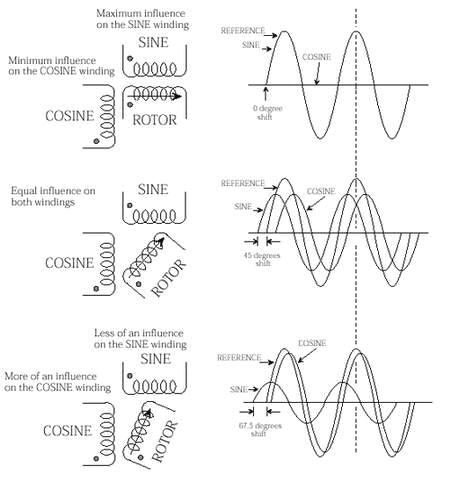
โครงสร้างของรีโซลเวอร์จะมีลักษณะคล้ายกับมีหม้อแปลงไฟฟ้าอยู่ 2 ชุด โดยชุดแรก(ขวามือ )จะเป็นชุดที่รับสัญญาณอ้างอิงหรือสัญญาณกระตุ้นซึ่งมีความถี่สูงในย่าน 2-10 KHz จากคอนโทรลเลอร์เพื่อสร้างแรงเคลื่อนเหนี่ยวนำเพื่อให้เกิดกระแสไหลไปสร้างสนามแม่เหล็กให้กับขดลวดชุดที่สอง ส่วนชุดที่สอง(ซ้ายมือ )จะประกอบด้วย ขดลวดปฐมภูมิที่ติดกับโรเตอร์ 1 ชุด และมีขดลวดทุติยภูมิ 2 ชุด (one primary and two secondary windings) วางในตำแหน่งที่ทำมุมห่างกัน 90 องศา ซึ่งเรียกว่าขดลวด sine และ cosine
|
========================================================
 |
||
- ================= ยูทุปของ 9engineer ,com ===================
- คลิปที่น่าสนใจจัดทำโดย 9engineer.com ภายใต้ชื่อช่องTechnology talk Channel
- 1. วงจรและวิธีการสตาร์ทแบบไดเร็คออนไลน์ DOL
- 2. วงจรควรคุมการกลับทางหมุน
- 3. วงจรและวิธีการสตาร์ทแบบสตาร์ เดลต้า Y-D Starter
- 4. การสตาร์แบบออโตทรานส์ฟอร์เมอร์ Auto transformer starter
- 5. การต่อขดลวดมอเตอร์ อย่างไรไม่ให้เกิดการใหม้หรือเสียหาย
- 6. การเช็ตโอเวอร์โหลดรีเลย์
- 7.การเช็ตโอเวอร์โหลดรีเลย์กับมอเตอร์ที่มีเซอร์วิสแฟคเตอร์
- 8.รีเลย์กับคนแทคเตอร์ต่างกันอย่างไร
- 9.อื่นๆ
- **** นายเอ็นจิเนียร์ขอสงวนสิทธิ์รับรองความถูกต้อง โปรดใช้วิจารณญาณในการรับข่าวสารข้อมูล