หลังจากที่มีการเปลี่ยนมอเตอร์ตัวใหม่แทนที่ตัวเก่าที่มีปัญหา ซึ่งตัวใหม่หากจากดู nameplate แล้วเหมือนตัวเก่าทุกประการ จำเป็นต้องทำ Auto Tune หรือไม่ และหากไม่ทำ Auto Tuningจะมีปัญหาอะไรหรือไม่ ?
ประเด็นนี้ถือว่าเป็นคำถามที่พบบ่อยทั้งในกระทู้ของเว็บบอร์ดและที่หน้างานจริงๆสำหรับผู้ที่ใช้เครื่องจักรที่ใช้อินเวอร์เตอร์เป็นตัวควบคุมควบเร็วและควบคุมทอร์ค
โดยทั่วไปแล้วเครื่องจักรใดๆก็ตาม ก่อนที่จะมีการส่งมอบให้เจ้าของโปรเจ็คเซ็นต์รับมอบงาน ผู้รับเหมาหรือซัพพลายเออร์จะต้องทำการ commissioning พร้อมทำการทดสอบฟังก์ชั่นต่างๆให้เจ้าของโปรเจ็คมั่นใจว่าเครื่องจักรนั้นๆสามารถใช้งานหรือทำงานได้จริงๆตามข้อตกลง และการทำ Auto Tuning ก็ถือว่าเป็นหนึ่งในขึ้นตอนการ coomissioning สำหรับเครื่องจักรทั่วไปที่ใช้อินเวอร์เตอร์เป็นตัวควบคุม
Auto Tuning คืออะไร ?
บางท่านอาจมีความเข้าใจพื้นฐานเกี่ยวกับอินเวอร์เตอร์ไม่ดีพอ ก็อาจจะมีข้อสงสัยว่า Auto Tuning มันคืออะไรและมีผลอย่างไรก้บเร็วและแรงบิด(speed & Torque )ของมอเตอร์ที่ใช้งานอยู่
การทำ Auto Tuning ก็คือการสั่งให้อินเวอร์เตอร์ทำการจูนหรือปรับแต่งค่าหรือพารามิเตอร์ PID controller ให้เหมาะสมกับ process ที่ต้องการควบคุมนั้นๆนั่นเอง ซึ่งเป็นการสั่งให้ระบบช่วยจูนให้โดยอัตโนมัติ (การปรับจูนนี้จะมีผลกับเฉพาะระบบควบแบบระบบปิดเท่านั้น (closed loop control ) ส่วนระบบคอนโทรลแบบลูปเปิด หรือ open loop control พารามิเตอร์ตัวนี้จะไม่มีผลใดๆ)
***** Auto Tuning ถือเป็น feature หนึ่งของระบบไดร์ฟรุ่นใหม่ๆ ซึ่งหากเป็นไดร์ฟหรืออินเวอร์เตอร์รุ่นเก่าๆหน่อยก็จะไม่มีลูกเล่นนี้ ซึ่งจะต้องใช้วิธี manual tunning แทน ซึ่งต้องใช้เวลามากกว่าจะปรับจูน PID controller
จากที่ได้เกรินนำมาจะเห็นได้ว่า Auto Tuning จะมีผลกับระบบ (closed loop control ) ดังนั้นในระบบในระบบควบคุมมอเตอร์โดยใช้อินเวอร์เตอร์ก็เช่นเดียวกัน พารามิเตอร์ตัวนี้ก็จะมีผลเฉพาะกับโหมด เวกเตอร์คอนโทรล ( Vector Control) หรือ เวกเตอร์คอนโทรลที่ไม่ไช้เอ็นโค๊ดเดอร์ ( Vector Control without encoder) เท่านั้น ส่วนโหมด สกาลาร์ (scalar) หรือ V/F ถือว่าเป็น open loop control ซึ่งพารามิเตอร์กรู๊ปนี้จะไม่มีผลใดๆซึ่งไม่จำเป็นต้องทำ Auto Tuning
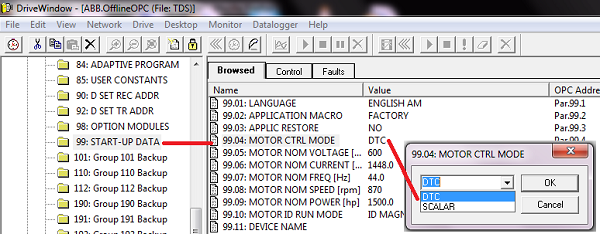
ตัวอย่าง การเลือกโหมดใช้งานของ ABB อินเวอร์เตอร์หรือไดร์ฟ ซึ่งจะมีโหมดการใช้งานให้เลือกอยู่สองโหมดด้วยกัน คือ Direct Torque Control (DTC) และโหมด scalar และสำหรับโหมด DTC ก็จะมีสองทางเลือกโดยขึ้นอยู่กับพารามิเตอร์กรู๊ป 50 ว่าจะกำหนดอย่างไร ดังรูปด้านล่าง
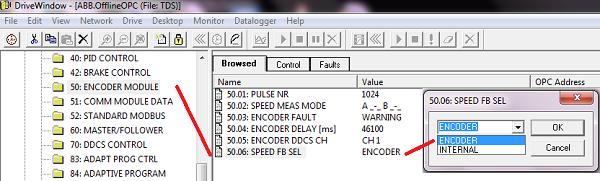
ถ้าพารามิเตอร์กรู๊ป 50.06 เลือก Encoder นั้นก็หมายความระบบนี้ใช้ ENCODER เป็นอุปกรณ์ป้อนกลับ ( speed feedback device ) ซึ่งการทำงานก็จะคล้ายกับระบบ Vector Control แต่ถ้า 50.06 เลือก INTERNAl สัญญานป้อนกับ (Feedback signal) ก็จะเป็นกระแสที่อ่านได้จาก cerrent transfermer ( C.T. ) การทำงานก็จะคล้ายกับ Vector Control without encoder ดังที่ได้เกรินมาตั้งแต่ต้น
**** Direct Torque Control (DTC) คือเทคโนโลยีเฉพาะ และเป็นชื่อเรียกเฉพาะของไดร์ฟยี่ห้อ ABB
ระบบจะทำอะไรหลังสั่งทำ Auto Tuning หรือสั่งทำ ID Run (กรณีของ ABB drives) ?
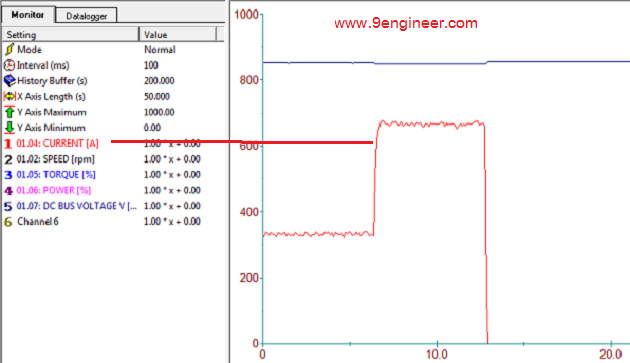
หากพิจารณาจากรูปกราฟด้านล่าง จะเห็นว่าระบบควบคุมของไดร์ฟจะสั่งการให้ภาคเพาเวอร์ (power unit ) ทำการฉีดกระแส ( Inject) เข้าไปยังขดลวดของมอเตอร์ เพื่อทำการอ่านค่าอิมพีแดนซ์ ( Z = R+Jxl ) ของเมอเตอร์เพื่อปรับจูนค่า PI controller ดังรูป
**** เวกเตอร์คอนโทรลคือการควบคุมให้กระแสทั้งสองทีเกิดจากสเตเตอร์และอาร์เมเจอร์ทำมุมตั้งฉากกัน 90 องศา เพื่อทำให้เกิดแรงบิดสูงสุดที่ทุกๆย่านความเร็วของมอเตอร์ ตั้งแต่ 0 - ความเร็วพิกัดที่แสดงบนแผ่นป้าย maneplate (base speed )
บล๊อคไดอะแกรมของการควบคุมแบบเวกเตอร์คอนโทรล
ถ้าเปลี่ยนมอเตอร์ใหม่ แล้วต้องทำ Auto Tunning หรือ ID Run หรือไม่ ทั้งที่แผ่นป้าย namepalte ของทั้งสองตัวเหมือนกันทุกประการ ?
คำถามนี้เป็นอะไรที่ถกเถึยงกันพอสมควรในหน้างานภาคสนาม บ้างก็บอกว่าไม่จำเป็นเพราะมอเตอร์ตัวใหม่ที่เพิ่งเปลี่ยนนั้นเหมือนตัวเก่า ทุกประการ และก็ทดลองใช้งานมาแล้ว ก็ไม่เห็นมีปัญหาอะไร
บางท่านก็บอกว่าจำเป็นเพราะว่าถึงแม้ว่าข้อมูลบนแผ่นป้ายของทั้งสองตัวจะ เท่ากันทุกประการก็ตาม แต่เชื่อได้ว่าค่าอิมพีแดนซ์ ของมอเตอร์แต่ละตัวจะไม่เท่ากัน ดังนั้นเราควรต้องปรับจูน PID controller ใหม่ทุกครั้งที่ทำการเปลี่ยนมอเตอร์
จากคำบอกเล่าของวิศวกรประจำไชต์งานตามที่ผมยกตัวอย่างมาให้ดูนั้น ฟังดูแล้วก็มีเหตุผลพอฟังได้ด้วยกันทั้งสองท่าน เหตุผลของท่านแรกก็ฟังดูดี เพราะอะไรๆมันก็เหมือนกันทุกอย่างจะต้องไปเสียเวลาปรับจูนใหม่ทำไมให้มัน ยุ่งยาก ฟังดูแล้วก็น่าจะคล้อยตาม ซิมิๆ
จากประสบการณ์ที่เคยไปแก้ปัญหาให้ลูกค้ามาหลายรายการ ผมสามารถสรุปได้ดังนี้
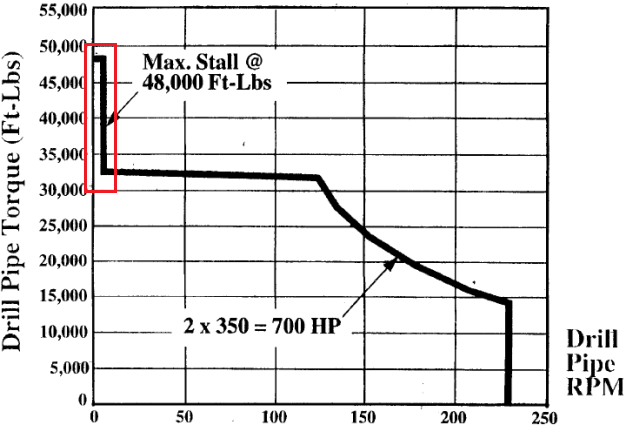
ตัวอย่างกราฟแสดงสมรรถนะของเครื่องจักรชนิดหนึ่ง ซึ่งใช้เกียร์ทด 11:1 โดยประมาณ และความเร็วรอบที่เพลา(shaft) สามารถปรับได้ตั้งแต่ 0 -125 RPM เครื่องจักรนี้ใช้มอเตอร์ขนาด 350 แรงม้า 2 ตัว ช่วยกันขับเคลื่อน
กรณีเช่นนี้ขึ้นอยู่กับลูกค้าว่าได้ใช้งานเครื่องจักรในย่านความเร็วเท่าไร และใช้ทอร์คในการขับเคลื่อนเท่าไร หากเครื่องจักรนั้นใช้งานที่ความเร็วไม่ต่ำมาก กล่าวคือไม่ต่ำจนกระทั่งไกล้เคียง 0 rpm และใช้งานไม่เก็นทอร์คพิกัด (rated torque ) ลูกค้าก็อาจไม่เห็นปัญหาอะไร และคิดว่าไม่จำเป็นต้องปรับจูนไหม่ให้ยุ่งยาก โดยเฉพาะอย่างยิ่งลูกค้าที่ไม่ค่อยมีความถนัดในการใช้งานเกี่ยวกับตัวไดร์ฟก็จะขาดความมั่นใจในการทำการปรับจูน
แต่เมื่อใดก็ตาม หากเครื่องจักรนั้นๆจำเป็นต้องใช้งานที่ความเร็วต่ำมากๆ เช่นใช้งานที่ความเร็วไกล้เคียง 0 rpm หรือที่ความเร็ว 0 rpm และต้องใช้งานทอร์คในย่าน Maximum torque ( ในบริเวณกรอบสีแดงดังรูปด้านบน) รับรองได้ว่าเครื่องจักรนี้จะได้รับผลกระทบทันที
ปัญหาที่พบก็คือเมื่อมีการใช้งานในย่านนี้ ( ในบริเวณกรอบสีแดงดังรูปด้านบน) มอเตอร์จะออกอาการ jerking กล่าวคือมอเตอร์จะไม่สามารถจ่ายแรงบิดเพื่อต้านโหลดที่ต้องการได้ มอเตอร์จะไม่นิ่งจะสั่นและจะออกอาการเดินหน้าถอยหลังๆอยู่ตลอดเวลา
ดังนั้นท่านใดก็ตามที่มีเครืองจักรที่ใช้ไดร์ฟหรืออินเวอเตอร์เป็นตัวควบคุมความเร็วและทอร์ค และใช้โหมดการควบคุมแบบ closed loop control ทุกๆครั้งที่ทำการเปลี่ยนมอเตอร์ใหม่ อย่ามองข้ามความปลอดภัยนะครับ ควรทำ auto tuning ซะก่อน ก่อนที่จะใช้งาน เพราะหากท่านได้ค่า PI controller ที่เหมาะสมแล้วละก็ มันจะช่วยให้เครื่องจักรของท่านทำงานได้อย่างมีประสิทธิภาพมากขึ้น นอกจากนั้นยังช่วยในลดการสั่นสะเทือนซึ่งมีผลระยะยาวต่อตัวมอเตอร์ลงด้วย
โชคดีและมีความสุขกับการใช้งานอินเวอร์ ครับ
โอกาสหน้าจะนำประสบการณ์เรื่องไดร์ฟมาเล่าสู่กันฟังอีก หากเพื่อนๆสมาชิกให้ความสนใจ
อย่าลืมนะครับ ชอบกดไลน์ ถูกใจกดแชร์ ถูกใจกดป้ายผู้สนับสนุนด้านล่าง
เว็บมาสเตอร์ 9engineer.com